本项目来自 RWKV 社区开发者 zyaaa-ux ,项目链接:https://github.com/zyaaa-ux/ROSA-Tuning。
本项目为社区提出的一种 ROSA 实现,不代表 RWKV-8 ROSA 的实际性能,效果供参考。
本项目提出 ROSA-Tuning,一种通过检索回忆机制增强预训练模型长上下文建模能力的方法。该方法在传统注意力机制之外并行引入基于 CPU 的 ROSA(RWKV Online Suffix Automaton)检索模块,从长上下文中高效定位与当前查询相关的历史位置,并以可训练的方式将检索到的信息注入模型状态,故随后的加权融合可由状态受限的高效注意力完成。
为实现端到端训练,本文设计了二值离散化策略与反事实梯度算法,并通过 CPU–GPU 异步流水线进一步优化整体执行效率。
在 Qwen3-Base-1.7B 上的系统性评估结果表明,ROSA-Tuning 能够显著恢复窗口注意力模型的长上下文建模能力,在 LongBench 等基准上取得接近甚至匹配全局注意力的性能,同时保持与窗口注意力方法几乎相当的计算效率与显存占用,为高效长上下文处理提供了一条新的技术路径。
性能测试
困惑度 (PPL) 对比
在 PG-19 数据集上的测试显示,ROSA 适配器成功修复了窗口注意力的 PPL 劣化,甚至优于全局注意力。
| Model | PPL (越低越好) |
|---|---|
| Global Attention | 18.96 |
| Windowed Attention | 74.50 |
| Windowed + ROSA | 17.63 |
实验设置:
- 基础模型:具有全局注意力或窗口注意力的 Qwen3-Base-0.6B
- 训练:28,000 个样本,在 PG-19 训练集上训练 1 个轮次,原始模型冻结,仅训练 ROSA 适配器
- 评估:PG-19 测试集,序列长度 16k,窗口大小 1024
长文本能力 (LongBench)
在大海捞针 (NIAH) 测试,ROSA 实现了 100% 的召回率。综合评分恢复至全局注意力的 96.5%。
| Task / Metric | Global Attention | Windowed (2048) | Windowed + ROSA |
|---|---|---|---|
| NIAH (大海捞针) | 100.00 | 6.20 | 100.00 |
| TriviaQA | 86.20 | 61.56 | 84.34 |
| Multi_news | 23.23 | 10.43 | 23.76 |
| Samsum | 42.04 | 32.51 | 40.53 |
| TREC | 72.67 | 52.67 | 68.00 |
| Gov_report | 31.11 | 13.08 | 26.19 |
| LongBench 平均分 | 59.21 | 29.41 | 57.14 |
实验设置:
- 基础模型:Qwen3-1.7B-Base,具有全局注意力或窗口化注意力(窗口大小2048)
- 训练数据:约 37B tokens,其中约 30B 来自 prolong,约 7B 来自其他上下文推理数据集,且不与测试集重叠
使用方法
项目作者进行了非常多的实验,本次介绍 2025 年 12 月 29 日更新的 2025.12.29 qkv_update.py 的使用方法。
注意在本地准备 Hugging Face datasets 库保存到磁盘的格式(Arrow 格式)的数据。
环境准备和代码获取
首先运行下列代码安装需要的库:
pip install torch transformers datasets deepspeed numba numpy
可选安装
flash-attn库,该库能够提升代码运行速度,但首次安装时需要编译。
然后运行下列命令,获取项目代码:
git clone https://github.com/zyaaa-ux/ROSA-Tuning
准备 DeepSpeed 配置文件
项目使用了 DeepSpeed 进行加速,因此需要在本地创建一个 deepspeed_config.json 文件,示例如下:
{
"fp16": {
"enabled": "auto",
"loss_scale": 0,
"loss_scale_window": 1000,
"initial_scale_power": 16,
"hysteresis": 2,
"min_loss_scale": 1
},
"bf16": {
"enabled": "auto"
},
"zero_optimization": {
"stage": 2,
"allgather_partitions": true,
"allgather_bucket_size": 200000000,
"overlap_comm": true,
"reduce_scatter": true,
"reduce_bucket_size": 200000000,
"contiguous_gradients": true,
"offload_optimizer": {
"device": "cpu",
"pin_memory": true
},
"offload_param": {
"device": "none"
}
},
"gradient_accumulation_steps": "auto",
"train_batch_size": "auto",
"train_micro_batch_size_per_gpu": "auto",
"gradient_clipping": "auto",
"steps_per_print": 20,
"wall_clock_breakdown": false
}
如果显存足够,可以删除
offload_optimizer中的pin_memory参数,并将device的值修改为 none,来获得更快的运行速度。
修改配置
2025.12.29 qkv_update.py 的 68~73 行定义了路径参数,需要修改路径参数为你本地的路径。
MODEL_LOCAL_DIR = "/path/to/base/model/" # 本地基础模型路径
MODEL_DIR = "/path/to/checkpoint/" # 模型检查点保存路径
DATASET_DIR = "/path/to/processed/dataset/" # 数据集路径
OUTPUT_DIR = "/path/to/output/" # 输出路径
DEEPSPEED_CONFIG_PATH = "/path/to/deepspeed/config.json" # DeepSpeed 配置文件路径
如果需要更加节省显存,可以修改代码第 119 行为 True,打开梯度累计:
GRADIENT_CHECKPOINTING = True # 源代码是 False
如果本地无 flash-attn 库,可以修改第 78 行的代码,关闭 flash-attn 的使用:
USE_FLASH_ATTN = False # 原来是 True
运行启动命令
由于使用了 DeepSpeed 和分布式训练逻辑(is_main_process 等检查),推荐 deepspeed 命令启动。
deepspeed --num_gpus=1 2025.12.29 qkv_update.py
启动成功后,会输出以下内容:
该图为使用 200 条长度为 128 的数据在单卡 4090 上进行流程测试的示例,实际训练 16k 长度数据时需要很大的显存。
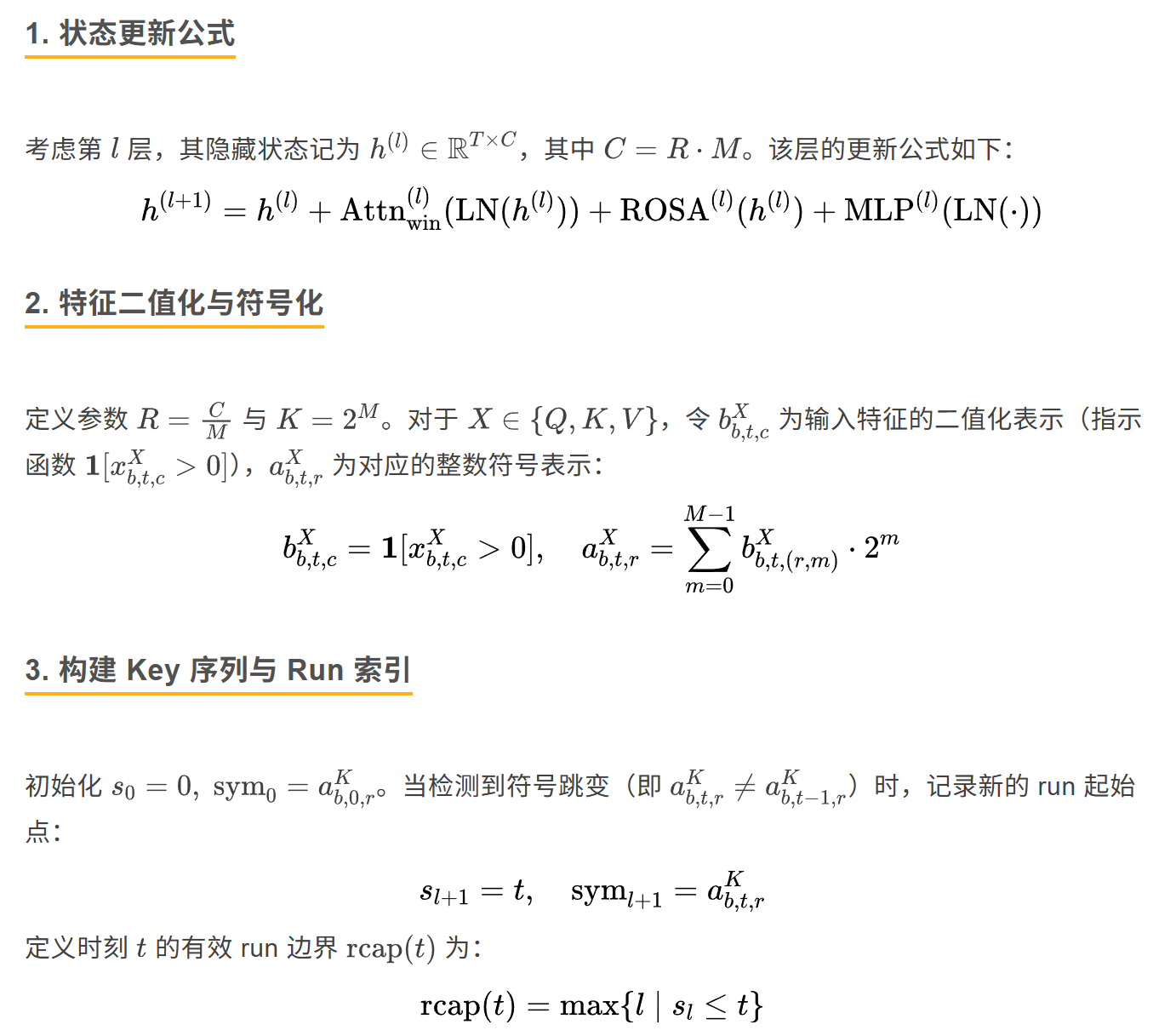
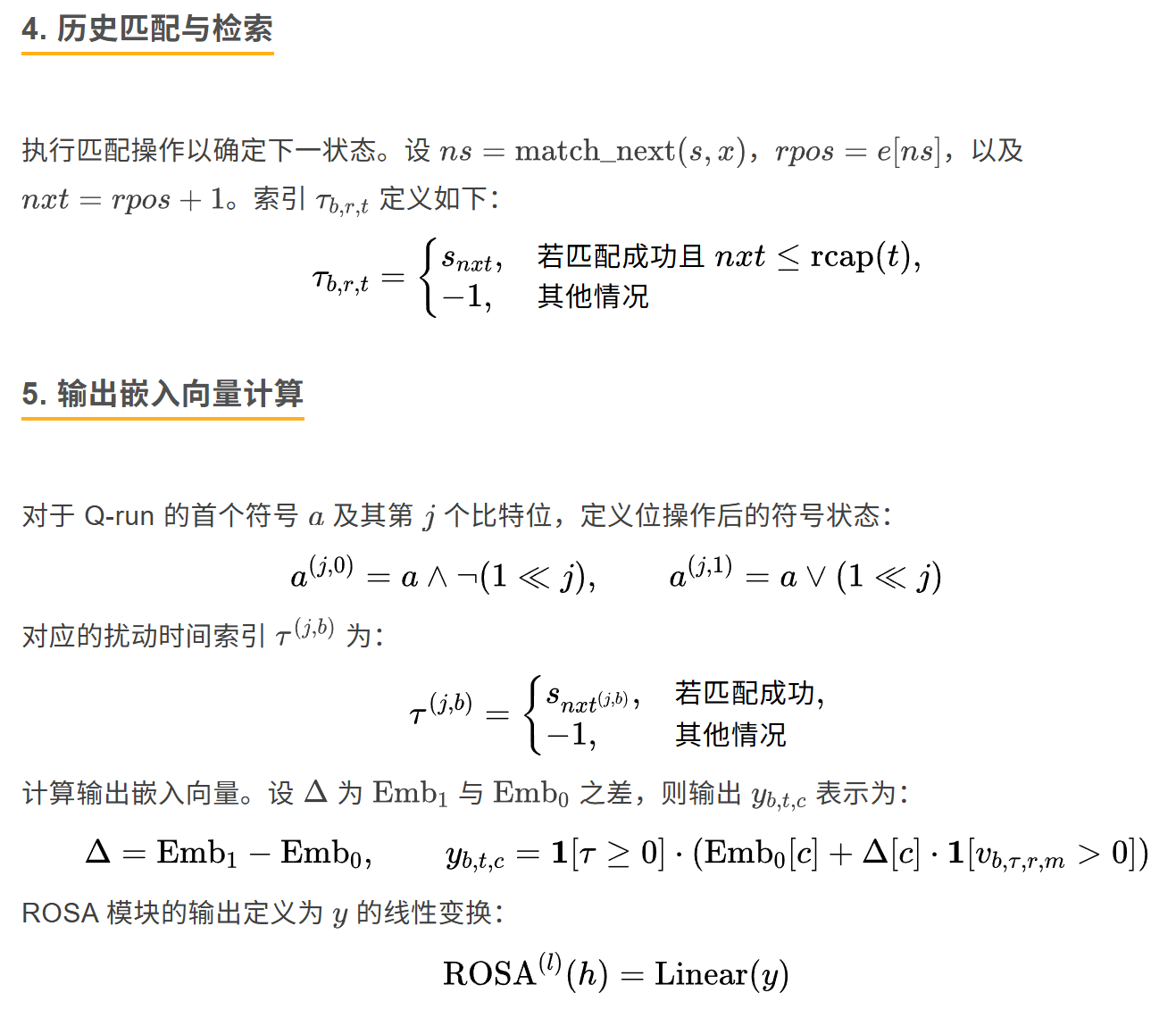
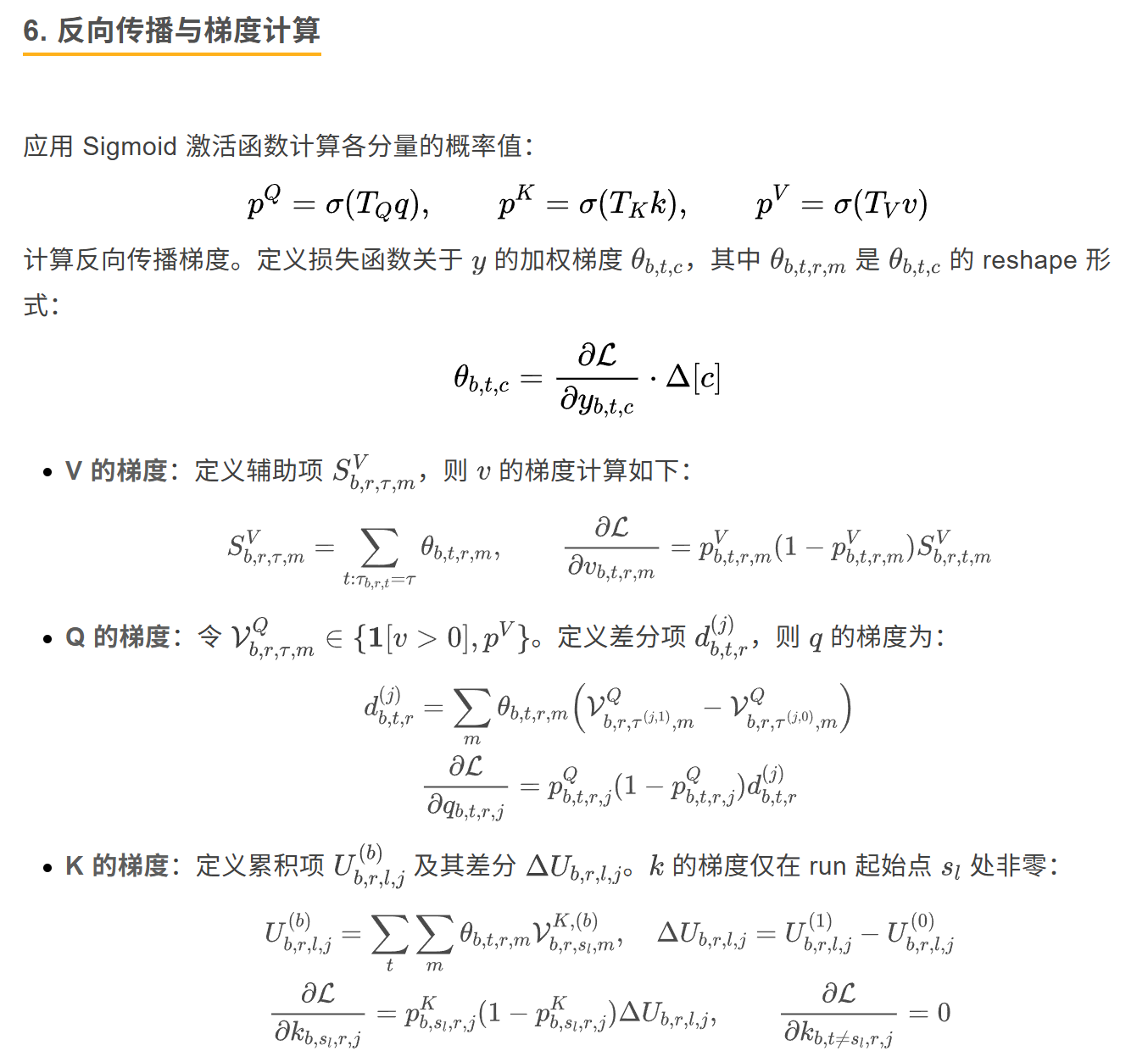
🧠 原理概述
加入 RWKV 社区
欢迎大家加入 RWKV 社区,可以从 RWKV 中文官网了解 RWKV 模型,也可以加入 RWKV 论坛、QQ 频道和 QQ 群聊,一起探讨 RWKV 模型。
- 📖 RWKV 中文文档:https://www.rwkv.cn
- 💬 RWKV 论坛:https://community.rwkv.cn/
- 🐧 QQ 频道:https://pd.qq.com/s/9n21eravc | QQ 交流群:224287095
- 📺 BiliBili 视频教程:https://space.bilibili.com/3546689096910933
欢迎大家基于 RWKV-7 进行创业、科研,我们也会为基于 RWKV 的项目提供技术支持。
如果您的团队正在基于 RWKV 创业或开展研究,请联系我们!(在“RWKV元始智能”微信公众号留言您的联系方式,或发送邮件到“contact@rwkvos.com”。)
</div>相关推荐
- 「第三届开放原子大赛」获奖队伍专访来啦!企业篇
- 从本体论到落地实践:制造业数字化转型的核心逻辑与工具选择 | 葡萄城技术团队
- 轻松搞定Excel公式错误:SpreadJS让表格开发不再头疼 | 葡萄城技术团队
- vivo GPU容器与 AI 训练平台探索与实践
- SQLShift V6.0 发布!函数迁移&达梦适配一步到位!
- Oinone × AI Agent 落地指南:别让 AI Agent 负责“转账”:用神经-符号混合架构把它从 Demo 拉进生产
- 借助 Okta 和 NGINX Ingress Controller 实现 K8s OpenID Connect 身份验证
- 同样是低代码,为什么有人扩容有人烂尾?答案藏在交付体系里-拆解 Oinone 的交付底座


