在这篇文章中,我们将探讨相位调制(PM)和频率调制(FM)之间的数学关系。然后,我们将学习如何使用PM调制器来生成FM信号,反之亦然。
角度调制技术分为两类:相位调制(PM)和频率调制(FM)。本系列的前一篇文章介绍了相位调制,并提供了几个示例波形,以帮助我们理解消息信号如何影响PM波。现在,当我们从更数学的角度继续讨论时,我们将把重点扩大到包括频率调制。
使用瞬时频率的概念,我们将创建这两种信号类型的数学表示。这反过来将有助于我们探索两种角度调制形式之间的关系。正如我们将要发现的,PM和FM方法是如此密切相关,以至于加入一个额外的电路可以使一种类型的调制器产生另一种类型信号。
PM波:相位与频率的关系
角度调制信号可以表征为具有恒定幅度和根据所传输的消息信号而变化的自变量(θi)的正弦函数:
 方程式1
方程式1我们将θi称为瞬时角度或瞬时相位。在PM中,瞬时角度随消息信号线性变化,产生:
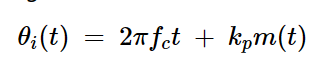 方程式2
方程式2其中:
fc是载波频率
kp是比例常数
m(t)是消息信号。
图1显示了载波频率fc=80 Hz和恒定值kp=25 rad/V的正弦消息信号产生的PM波。
正弦消息信号及其相应的相位调制波。
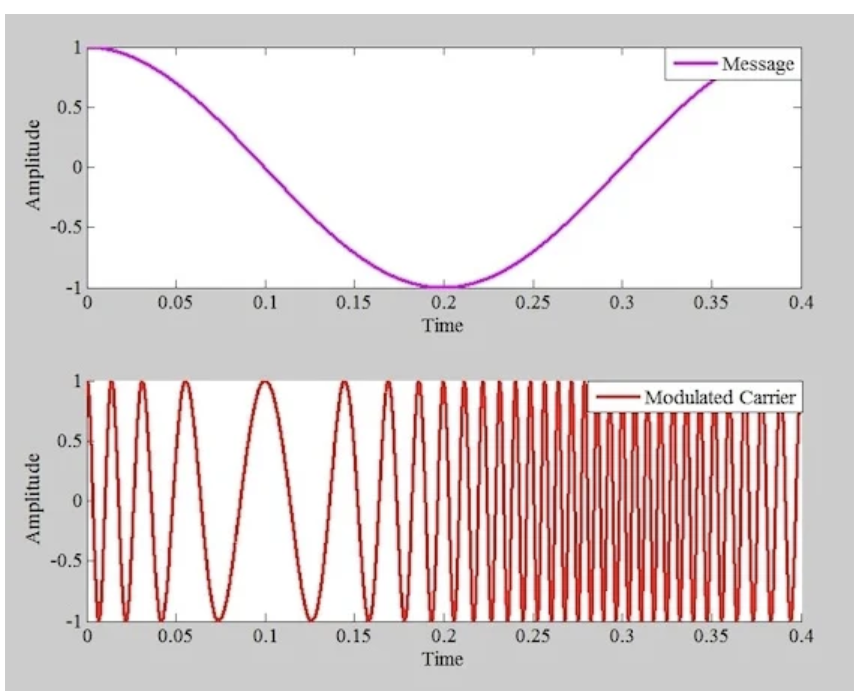 图1 正弦消息信号(顶部)及其对应的PM波(底部)
图1 正弦消息信号(顶部)及其对应的PM波(底部)如上所述,消息波形的下降部分导致输出频率降低,而上升部分则增加了输出频率。前一篇文章提供了几个例子来演示消息信号的上升或下降部分如何影响PM波的频率。
关于这一现象的另一种观点是,当消息信号随时间增加时,它会在2πfct贡献的相位项上增加一个递增项(见方程2)。因此,调制波的相位更快地完成了一个完整的周期。这表现为频率的增加。换句话说,PM波在m(t)的正斜率期间压缩。
相反,当消息信号随时间减少时,它会产生负相位变化,抵消2πfct项引起的部分正相位变化。这意味着调制波需要更长的时间来完成一个完整的周期,从而导致频率降低。换句话说,PM波形在m(t)的负斜率期间伸展。
为了更好地理解这一解释,考虑以下fc=100 Hz的正弦函数:
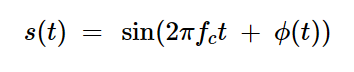 方程式3
方程式3其中ϕ(t)是相加的相位偏差。图2显示了ϕ(t)三种不同条件下该正弦曲线的四分之一周期:
ϕ(t)=0
ϕ(t)=90-100t
ϕ(t)=90+100t
对于三种不同的相位偏差条件,由方程3描述的波的四分之一周期。
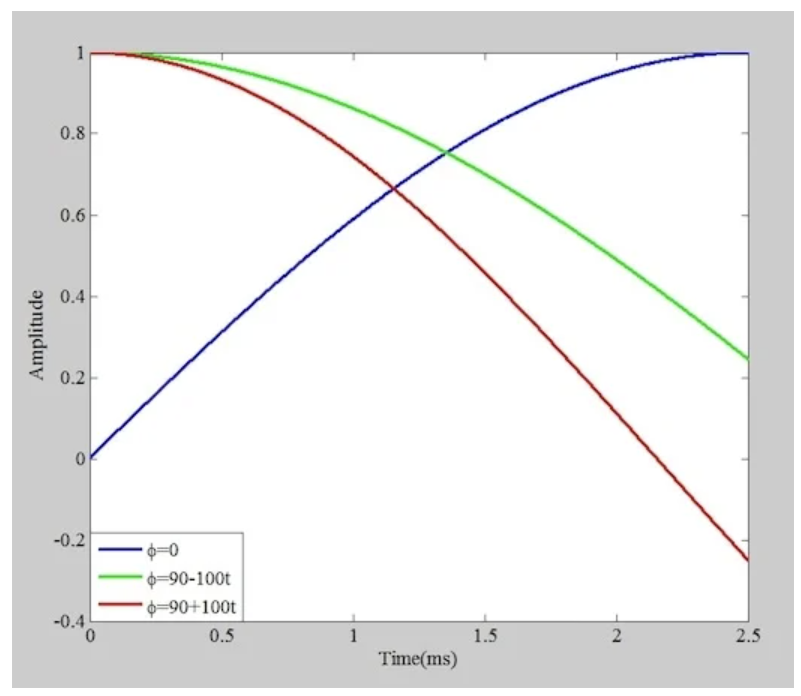 图2 对于ϕ(t)的三种不同条件,方程3描述的波的四分之一周期
图2 对于ϕ(t)的三种不同条件,方程3描述的波的四分之一周期在上图中,蓝色曲线(ϕ(t)=0)表示未调制波。对于蓝色曲线,四分之一的周期跨越0到2.5毫秒的间隔。
红色曲线(ϕ(t)=90+100t)表示PM波,其中消息信号随时间增长。在这种情况下,ϕ(t)的正相变与2πfct项的正相变相加。因此,超过四分之一的时间段在0到2.5ms的间隔内。
最后,绿色曲线(ϕ(t)=90-100t)表示相位项递减的PM波。ϕ(t)的负相变抵消了2πfct项的部分正相变。结果,不到四分之一的波形适合在0到2.5ms的间隔内。
瞬时频率
频率为fc、振幅为Ac、初始相位为ϕ0的未调制信号可以用以2πfc恒定角速度旋转的相量来表示。如图3(a)所示。如图3(b)所示,角度调制信号充当振幅为Ac的相量,以随时间变化的角速度旋转。
未调制和角度调制信号的相量表示。
 图3未调制信号(a)和角度调制信号(b)的相量表示
图3未调制信号(a)和角度调制信号(b)的相量表示让我们仔细看看角度调制波。我们如何描述它的旋转频率?当θi变化2π弧度时,相应的相量完成了一个完整的旋转周期。因此,从t到(t+Δt)的间隔内的平均频率(赫兹)可以通过以下公式获得:
 方程式4
方程式4在频率为fc、初始相位为ϕ0的未调制载波的特殊情况下,上述方程产生:
 方程式5
方程式5如图所示,未调制载波的平均频率等于fc。对于角度调制信号,平均频率取决于消息信号在感兴趣的时间间隔内的值。然而,如果我们让方程4中的Δt接近零,则获得的频率可以解释为旋转相量的瞬时频率fi(t)。对于Δt→ 0,方程可以用θi的时间导数重写:
 方程式6
方程式6使用上述方程,相应相量的角速度等于2πfi(t)rad/s。
通过应用瞬时频率的概念,我们可以解释图1中PM波的行为。如果我们将方程2中的θi代入瞬时频率方程,我们得到:
 方程式7
方程式7这意味着,随着消息信号随时间增加,输出频率也会升高。相反,随着消息信号的减少,输出频率下降。
表示PM和FM信号
现在我们了解了瞬时相位和瞬时频率的基础知识,我们可以用它们来提供PM和FM方案的统一描述。将瞬时相位写成:
 方程式8
方程式8其中ϕ(t)是相位偏差,我们可以将方程1描述的角度调制波表示如下:
 方程式9
方程式9这表明瞬时相位是由项2πfct和ϕ(t)设置的中心值之和。在两种角度调制形式中,ϕ(t)取决于消息信号。对于PM,ϕ(t)与消息信号成正比:
 方程式10
方程式10其中kp是比例常数。假设m(t)是一个电压量,kp以弧度/伏特表示。
由方程9描述的调制波的瞬时频率是通过求瞬时相位的导数来确定的:
 方程式11
方程式11瞬时频率中与消息相关的部分称为频率偏差:
 方程式12
方程式12在调频系统中,频率偏差与信息信号成正比:
 方程式13
方程式13其中kf是频率偏差常数。假设m(t)是一个电压量,kf以赫兹/伏特表示。
取上述方程的积分,我们可以确定ϕ(t)并将其代入方程8,得出FM信号方程:
 方程式14
方程式14请注意,由于积分,常数通常会出现在上述方程中。然而,我们假设在t=0时,未调制波的角度为零。这消除了常数。
当我们讨论常数时,值得一提的是,比例常数(kp)有几个不同的名称。根据您咨询的参考文献,您可能会发现kp被描述为相位偏差常数、调制器的相位灵敏度、相位调制指数,或者简称为调制指数。同样,kf——频率偏差常数——有时也被称为调制器的频率灵敏度。
FM与PM的关系
如果我们在FM和PM调制器的输入之间建立特定的关系,它们可以产生相同的输出。为了理解这一点,请考虑下面再现的PM信号方程旁边的方程14:
 方程式15
方程式15根据方程式14和15,这两种方法需要以下关系才能产生相同的输出:
 方程式16
方程式16其中:
mf(t)是施加到FM调制器的输入
mp(t)是施加到PM调制器的输入。
从方程16中,我们可以看出,如果mp(t)是mf(t)的积分,则PM和FM电路产生相同的输出。简而言之,如果我们在相位调制器的输入端放置一个积分器,我们就可以用它来产生FM信号。此设置如图4所示。
使用相位调制器产生FM波。
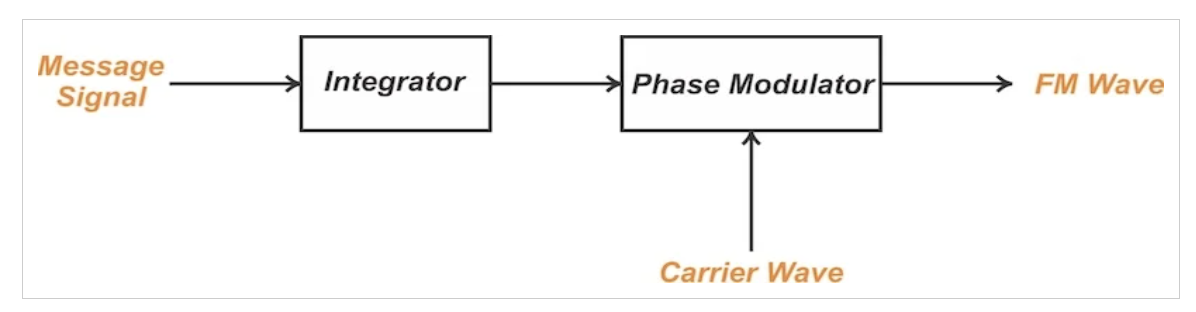 图4 使用相位调制器产生FM波
图4 使用相位调制器产生FM波方程式16还表明,如果施加到FM调制器的信号等于施加到PM调制器的信号的导数,则两种类型的调制器产生相同的输出。这意味着,如果我们在将消息信号用作FM调制器的输入之前对其进行微分,则可以使用FM调制器来生成PM信号(图5)。
通过使用FM调制器产生PM波。
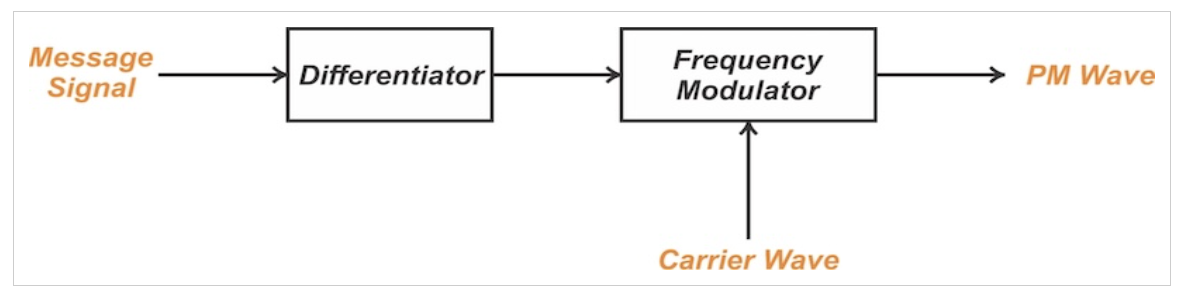 图5 通过使用FM调制器产生PM波
图5 通过使用FM调制器产生PM波例如,考虑图6左上角所示的方波消息m(t)。
左:方波信号及其对应的调频波。右图:锯齿波信息信号及其对应的PM波。
 图6 左上角:方波信息信号。左下角:对应的FM波。右上角:未调制的锯齿波。右下角:对应的PM波
图6 左上角:方波信息信号。左下角:对应的FM波。右上角:未调制的锯齿波。右下角:对应的PM波该图左下象限显示了与方波消息对应的FM波(fc=5 Hz,kf=1.59 Hz/V)。该图右上象限显示了锯齿波;右下象限显示kp=10 rad/V时的PM波。
并排放置时,两个调制波看起来完全相同。由于方波的积分会产生锯齿信号,这并不奇怪。
总结
在这篇文章中,我们通过引入数学视角,加深了对角度调制(PM和FM)的理解。我们深入研究了瞬时频率的概念,并利用这一概念研究了PM和FM方法之间的密切关系。我希望这篇文章能帮助您更深入地了解这些调制方法及其产生的信号的时域行为。
<!-- 非定向300*250按钮 17/09 wenjing begin --> <!-- 非定向300*250按钮 end -->
</div>

