
<h1>从混沌中见你所见------文生图的逆向浪漫</h1> 缘起
一直以来,我都希望能拍一组日照金山的照片,向往那种巍峨雪山的寂寥与金光漫射的神圣,因缘际会一直未能如愿。看着朋友圈的AI整的手办图,咱也试试生成一个。

你别说,你还真别说,有那么点意思。
我们考虑一个问题,如何让计算机学会画画?我们可能第一时间想到人类画画的过程:
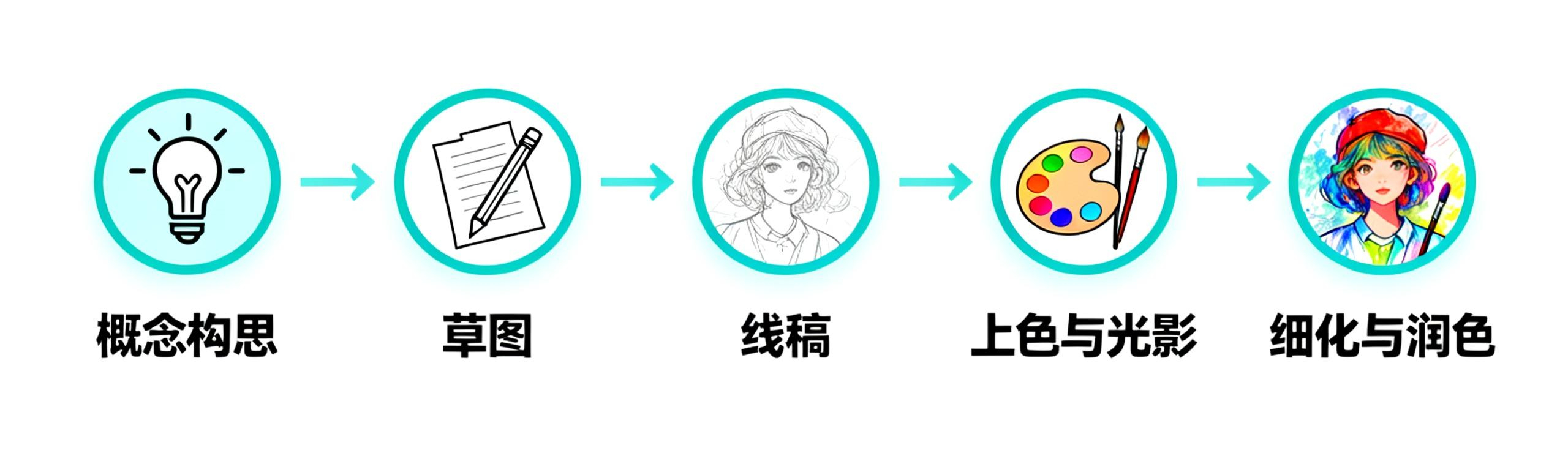
现实世界中有大量不同主体的摄影作品和美术作品,但美术作品大多不会有中间过程的披露,而摄影作品则完全没有(和我的快门说去吧)。所以,学习的出发点一定是现有的优秀作品。**人类学习通过反复练习内化技巧,计算机则是从数据中提取规律。**如果我们有一种可逆的操作,输入图片=>输出特征(学习过程),输入特征=>输出图片(工作过程),那么计算机画画的问题就解决了。
扩散
高斯噪声
对于学习过程,需要一个提取图像特征的步骤(需要可逆),换个说法就是遮蔽掉非特征的部分,这个遮蔽过程应该具备什么样的特征呢?
- 随机: 为了避免遮蔽本身对特征的影响,遮蔽需要随机(无结构、不可预测),否则最后提取的特征会包含这种遮蔽的特征。我们将随机的这种遮蔽,称为噪声(区别于”信号”)。
看到随机我们可能很自然的想到正态分布(高斯分布),自然界中的随机分布大多都是正态分布,这是中心极限定理的效用(大量独立随机因素的叠加效应,其最终结果的分布会趋于正态分布)。如果按照直觉选择标准正态分布,具体会有什么特性呢?
- 均值为0:对图像的正向和负向调节平均来看是抵消的,不会引入额外的分布特征。
- 简洁性:仅通过方差就可以调整噪声大小, 参数少更好控制。
- 稳定性:两个正态分布的和仍然是正太分布,这简化了计算,我们可以直接计算第N步的结果,不需要真的将N步完整走一遍。
- 各向同性:各个方向噪声是独立且同分布的,可以想象为一个球形,从所有方向均匀地作用于数据。这样我们在逆向过程时,不需要额外考虑噪声的方向偏好。
这种服从正态分布(高斯分布)的噪声我们称之为高斯噪声,下面展示一下高斯噪声的效果。 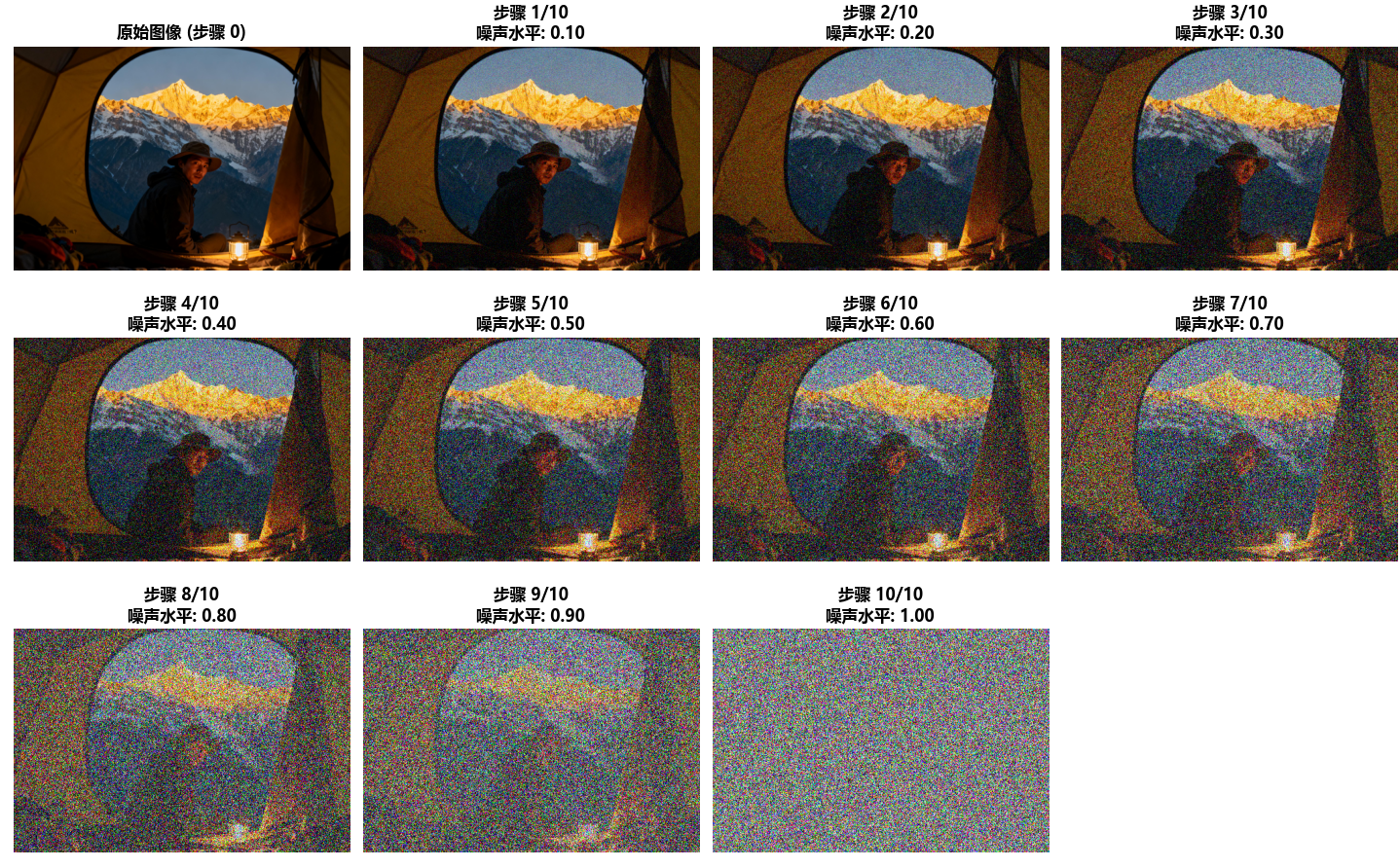
我们将步数记为 t ( 1 到 T ,T 通常为 1000 ),不同 t 对应不同的噪声水平,t = 0 时, 对应清晰图像。
$ x_t $ 记为该步数的噪声图像。
还记得我们我们的出发点吗? 我们需要这个过程是可逆的,现在的高斯噪声可以保留图像特征,但是我们怎么记忆这种噪声规律,如何从噪声中恢复图像呢(即对带噪声的图像去掉噪声)?
UNet
我们需要”神经网络”这个工具。
神经网络的目标在从训练数据中学习模式和关系,不断调整和改进,并运用所学做出预测或决策。
如果我们将不同噪声水平的图片 $ x_t $ 、步数 t、以及图片对应的文本描述 作为训练数据,目标是预测从原始干净图片 x₀ 生成 xₜ 时添加的噪声 ε。最终就可以 预测ε 去噪还原图像。
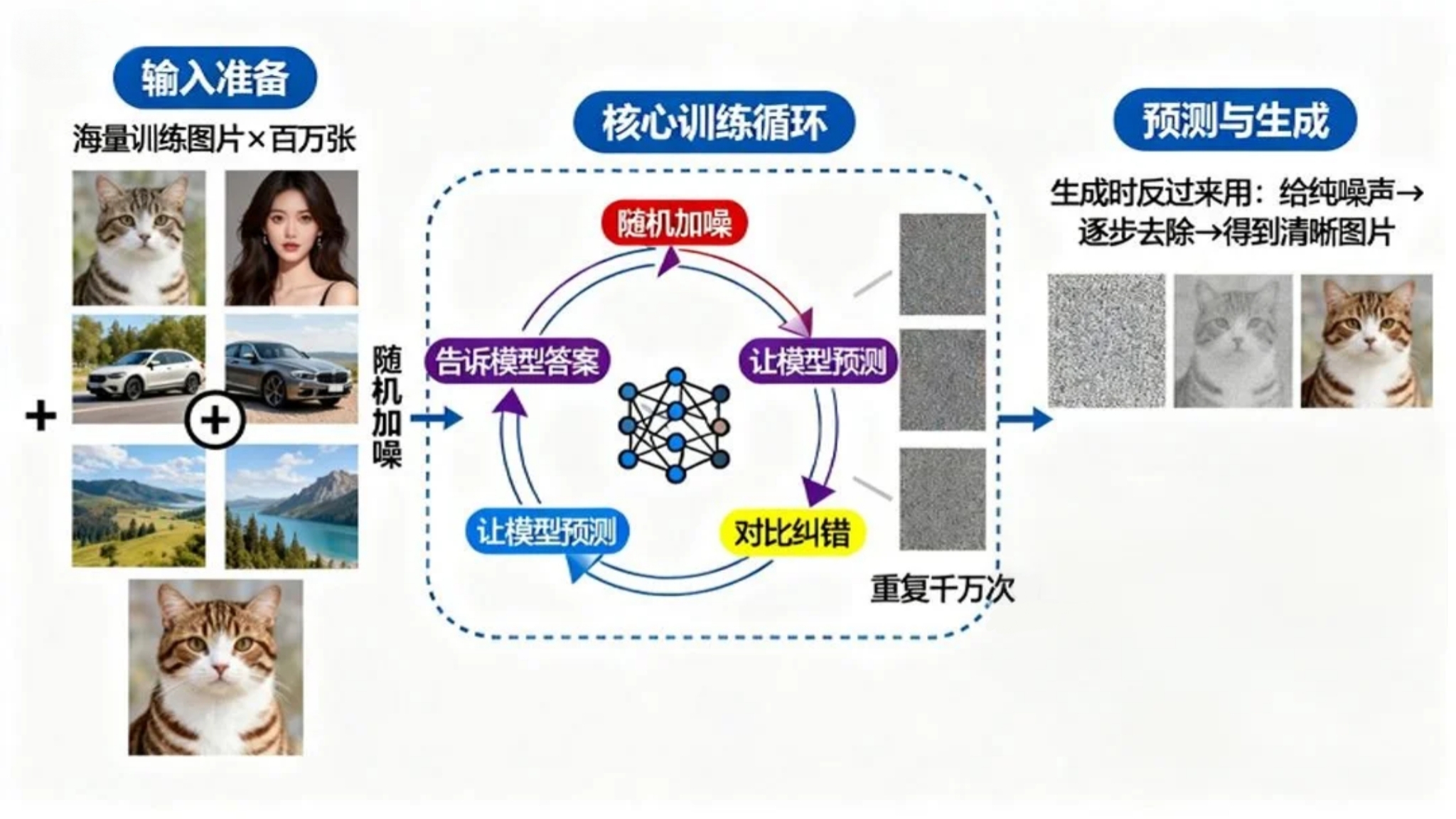
上面的神经网络模型主要结构是 UNet 模型。在预测是生成过程中,第一步的输入 $ x_t $ 是纯噪声 图片,此时信息已经完全损失,所以我们无法一步准确推导出 ε(准确的噪声),估算出一个噪声后,应该推导出 $ x_{t-1} $,迭代这个过程,不断更新 ε,我们的信息原来越多,得到的 ε 也会越来约准确。
对于上面的多步骤的过程。每次进行一步,都只仅依赖上一步的结果,这样每次计算的成本都相同,这种过程称为马尔可夫过程。
- 马尔可夫:你只看当前所在位置 → 每步只计算局部 → 线性高效
- 非马尔可夫:你不仅看当前所在位置,还需要记得上一个位置是什么,或者是否曾经访问过某个关键地点能决定下一步 → 复杂、慢
如果你不熟悉神经网络,还需要额外注意下上面的随机加噪,这一点也很重要, 第一直觉可能是直接从小到大遍历所有噪声水平,这是不合适的:
- 效率低:如果每次训练都需要遍历 所有步骤,训练时间太长。
- 过拟合:模型可能会在某个噪声水平上”过拟合”(只会背的题了,换个新题就表现很差),然后在下一个噪声水平上训练不稳定。
- 局部最优解:变的对不同噪声表现不敏感,而随机性可以带模型走出这个局部最优解。
这里我们已经接近 Diffusion 的核心原理了:**我们不是要直接画图,而是去掉噪声。**像是一个雕刻家一样:雕刻家仅仅是去掉石头多余的部分,把真正的形象”引出”。——米开朗基罗
Diffusion 有两个扩散过程(扩散:一点一点的变模糊或者清晰):
- 前向扩散:学习过程,即往图片中添加噪声的过程。
- 反向扩散:工作过程,即去除噪声一步一步还原为图片的过程。
到这里我们已经掌握了 Diffusion 模型的生图核心原理,下面对一些其他重要概念做简要说明。
潜空间 & VAE
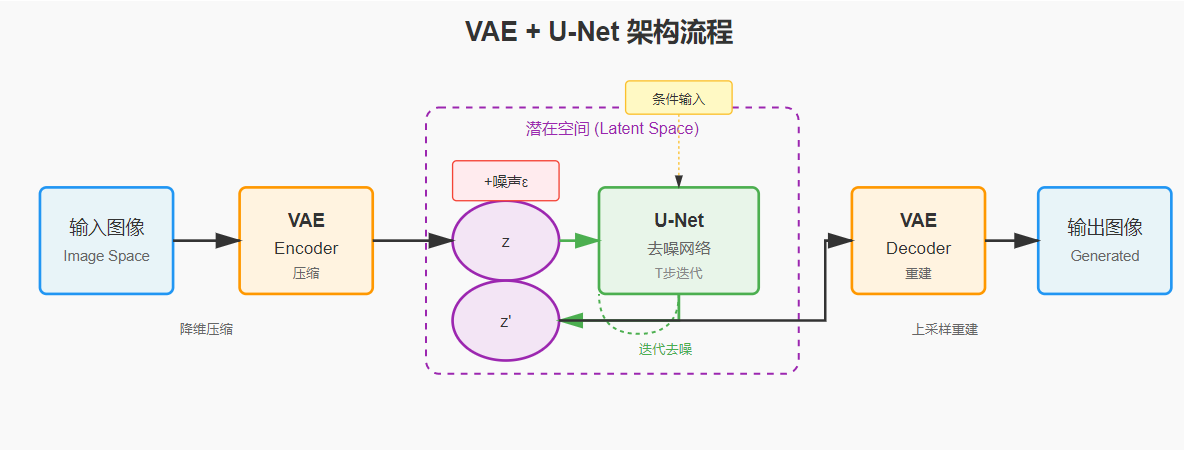
图片实际上非常复杂,常见的手机照片大约是:4032×3024 像素,每个像素会有3个维度 (3个0-255的数字表示颜色RGB)。对这样大的图像直接处理成本过高,我们需要对图片进行压缩(降维),这个压缩后的空间称为潜空间。处理压缩(编码)和解压(解码) 的常见模型为VAE。
压缩比通常为 8倍(每个维度),这么高比例的压缩是一种有损压缩,损失了两部分。
- 高频细节: 如毛发边缘、物体表现的细微纹理,小的噪点等。(所以看到AI画出的衣服纹理和皮肤细节通常表现都不好,涂抹的感觉很重)
- 冗余信息: 大量重复像素, 不需要记住每一个像素的颜色,只需要知道”这里有一大片蓝色”就够。
VAE 的全程是 变分自编码器,自编码器是深度学习中的一种神经网络架构,其训练目标是通过降维来压缩(或”编码”)输入数据,然后使用该压缩表示准确重建(或”解码”)其原始输入。
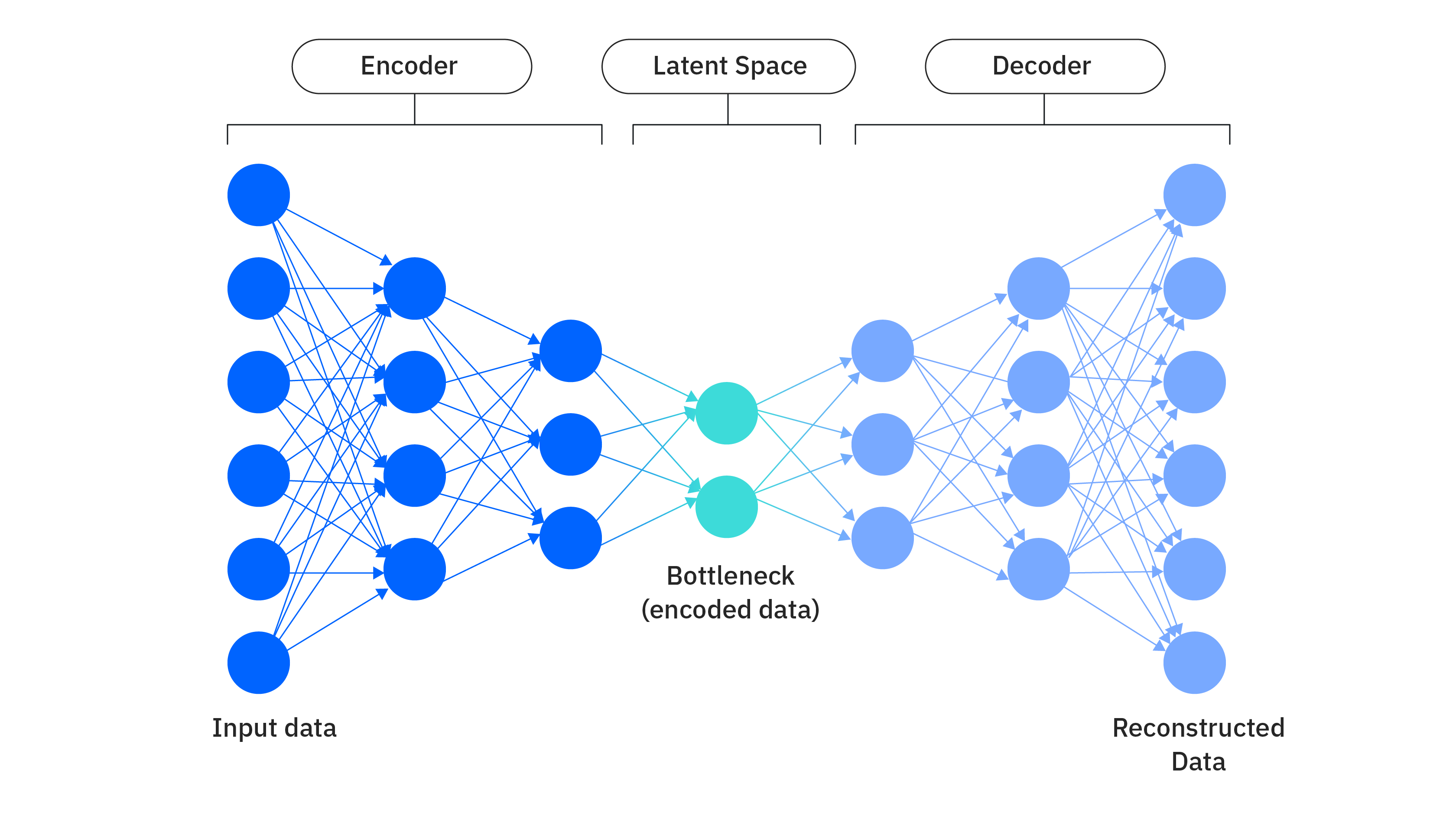
VAE 和 标准自编码器的区别:
-
标准自编码器:将训练数据的潜在变量编码为固定的离散值。两个相似的图片在如果用固定离散的点表示,可能会相距很远,而两个固定的点之间值可能是毫无意义的,
-
VAE: 将训练数据的潜在变量编码为以概率分布表示的连续可能性范围。平滑的概率分布会让相似的图片离得很近,附近区域内的点都是有意义的。
Diffusion 选择 VAE 是由于意义的潜空间表示和高质量的图像重构能力。
CLIP (文本编码器)
上面提到的所有内容和文生图还有一定距离,生成图像是怎么和我们输入的文本关联的呢?
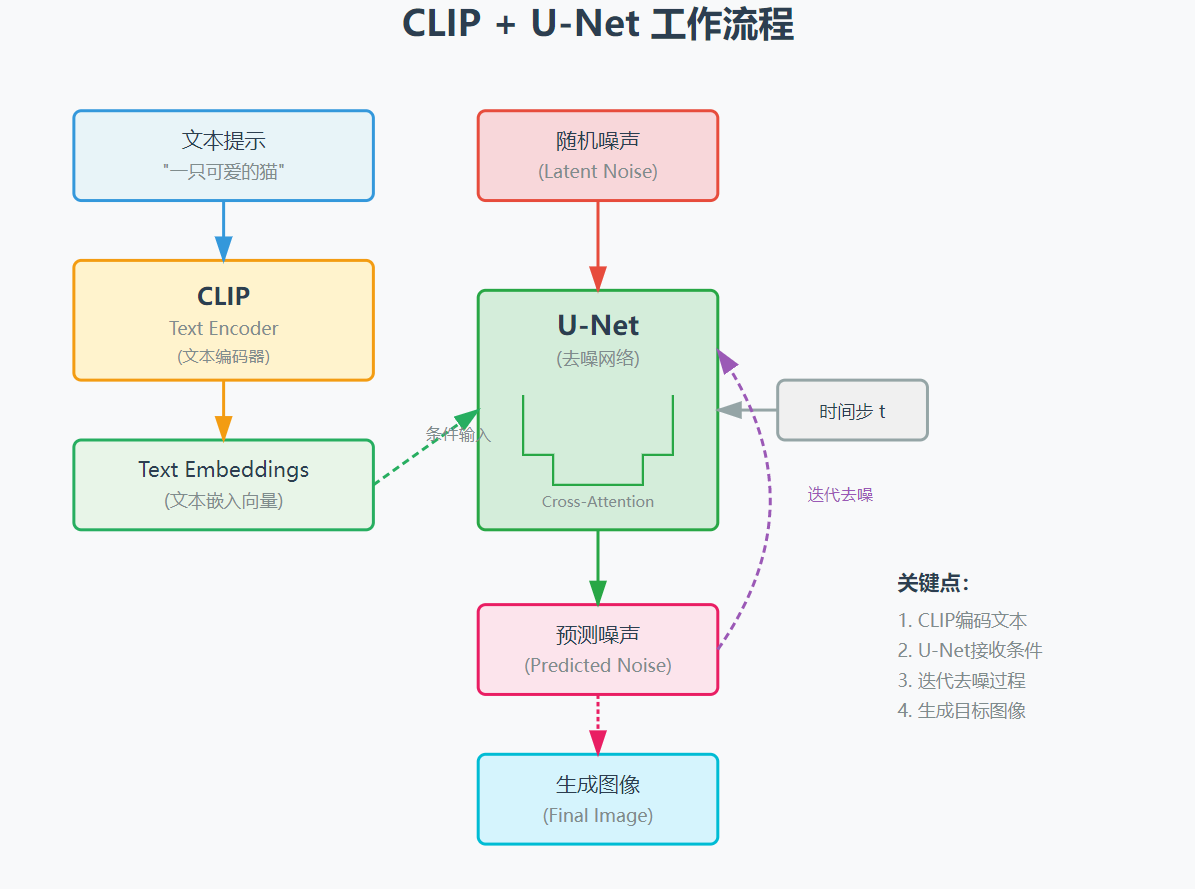
UNet 的去噪过程的起点是一张充满噪声的无意义照片,我们需要指导 UNet 每一步降噪都向我们的提示词靠近。这种机制称为交叉注意力,区别于自主意力(关注自己的内部元素),交叉注意力是两个不同的序列建立关联关系。 交叉注意力机制就是 CLIP 和 UNet 的工作桥梁。
CLIP 从海量的图像文本对中学习图像和文本的匹配关系,这不是在教一个模型”这张图是猫,那张图是狗”,而是让匹配的图片文字对的向量在数学空间中尽可能地靠近;让不匹配的尽可能地远离。这个过程叫做对比学习。经过数亿次这样的”拉近”和”推远”的训练后,模型就建立起了一个巨大的、共享的多模态嵌入空间。
这种方式带来了CLIP 的两个核心特性:组合泛化 和零样本学习。
举个例子:假设我们的训练数据中没有斑马,CLIP 还能有效的表示斑马吗? 一定程度上是可以的,CLIP 学会了”马”:”四条腿”、”长长的脸”、”鬃毛”等特征;同样,它也从老虎、斑马鱼、条纹衬衫等图片中学到了什么是”条纹”这个视觉模式。当你给出一个从未见过的描述,比如 一匹有黑白条纹的马,文本编码器能够将这些已知词语的语义向量组合起来,在嵌入空间中创造出一个全新的、指向这个复合概念的向量。
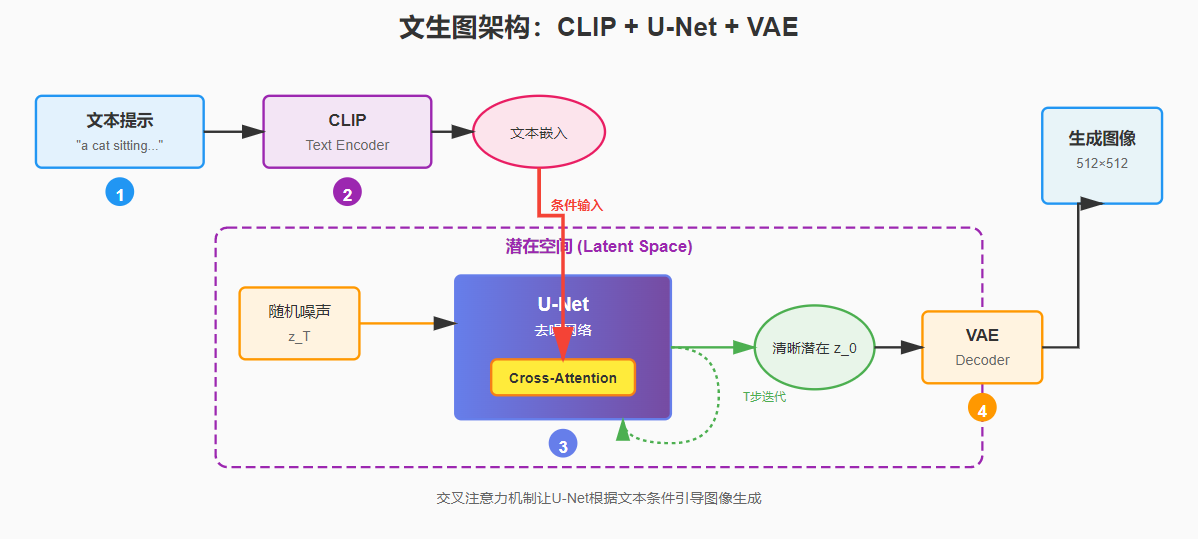
我们这里来整理下完整的流程:
逆向的浪漫
回到我们最初的标题——“从混沌中见你所见”。这不仅仅是技术描述,更是一种哲学思考:
我们不是在创造图像,而是在引导混沌显现出它本就蕴含的可能性。
就像摄影师等待光线,雕刻家发现石中的形态,我们通过文本提示,在无数可能性中引导出符合愿景的那一个。每一次生成都是与概率的共舞,在随机性与确定性之间寻找平衡。
</div>相关推荐
- 「第三届开放原子大赛」获奖队伍专访来啦!企业篇
- 从本体论到落地实践:制造业数字化转型的核心逻辑与工具选择 | 葡萄城技术团队
- 轻松搞定Excel公式错误:SpreadJS让表格开发不再头疼 | 葡萄城技术团队
- vivo GPU容器与 AI 训练平台探索与实践
- SQLShift V6.0 发布!函数迁移&达梦适配一步到位!
- Oinone × AI Agent 落地指南:别让 AI Agent 负责“转账”:用神经-符号混合架构把它从 Demo 拉进生产
- 借助 Okta 和 NGINX Ingress Controller 实现 K8s OpenID Connect 身份验证
- 同样是低代码,为什么有人扩容有人烂尾?答案藏在交付体系里-拆解 Oinone 的交付底座


