摘要
近年来,人工智能与嵌入式机器人技术迅速融合,推动了自主机器人系统从研究实验室走向实际产品。本项目“DOM”是一款从 0 开始设计与构建的 AI 驱动自主机器人,融合视觉感知、嵌入式控制、语音交互、边缘 AI 推理与云端监控等多项技术,具有自主导航、环境感知与实时交互能力。本文将从系统架构、软硬件设计、AI 算法、控制策略、系统实现与性能评估展开全面技术分析,既适合开发者快速理解项目设计逻辑,也为未来扩展提供工程指南。

自主机器人是嵌入式系统、人工智能、计算机视觉与控制工程等多学科交叉的重要研究方向。随着低功耗边缘计算设备与开源软件生态的成熟,使得个人开发者能够构建复杂的智能机器人系统。DOM 项目的目标即是展示这样一套完整的端到端自主机器人平台,具备下列核心能力:
环境视觉感知与目标识别
实时路径规划与避障导航
自主决策与任务执行
人机语音交互与反馈机制
远程监控与调试界面
DOM 是一个整体性的系统设计,它不仅实现机器人自主驱动,还展示了工程级集成与性能优化思路,适合作为嵌入式 AI 与机器人课程的项目案例,以及新手开发者快速入门模板。
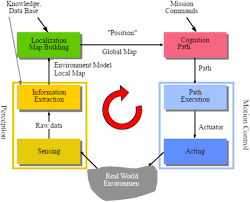
DOM 的系统架构可分为以下几大模块:
感知单元(Vision + Audio)
嵌入式控制单元(核心处理与 I/O 控制)
AI 推理模块(视觉识别与行为决策)
机器人运动控制与执行层
远程监控与控制仪表盘(Dashboard)
这五层协同工作,使 DOM 能够在现实世界中进行感知、决策、执行与反馈循环。
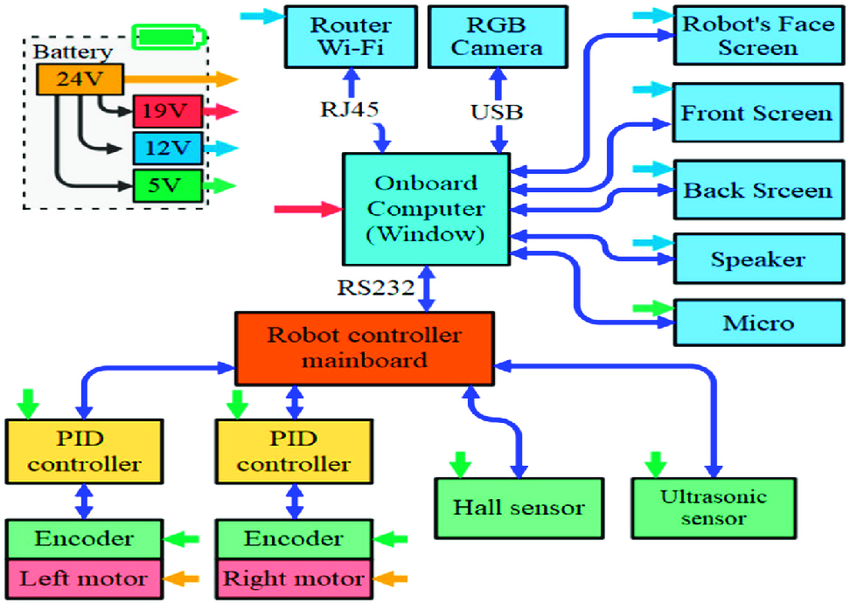
DOM 选用了广泛支持 AI 与多媒体处理的嵌入式平台和传感器组件,主要硬件如下:
作为主控制板,Raspberry Pi 3 具备以下关键优势:
ARM Cortex-A 系列 SoC,适合轻量 AI 推理与数据处理
丰富的 GPIO/I2C/SPI 接口,可扩展多种传感器
支持 Linux 系统与开源 AI 软件栈
社区资源丰富,有大量驱动支持
Raspberry Pi 3 提供了嵌入式机器人常见需求的处理能力,虽然不是最强的平台,但在成本与易用性之间提供了较好折衷。
用于获取机器人周边环境的视频图像,作为视觉感知与 AI 推理输入。
支持高清图像采集
与核心板紧密集成
为实时目标检测与导航算法提供输入数据
采用远场 7 麦克风阵列,可实现多方向语音拾取、波束成形与噪声抑制,使机器人具备语音交互能力。
用于语音反馈和音频提示,使人机交互更加自然。
3D 打印机:用于制造机器人结构与外壳
Ubuntu + Fusion 360 软件:用于开发环境与机械设计
DOM 的软件架构主要包含:
操作系统层
视觉与传感器驱动层
AI 推理与处理层
控制逻辑与策略层
数据通信与监控层
开发环境采用 Ubuntu 系统,以便于集成开源工具和库,并运行在 Raspberry Pi 上。Linux 提供强大的驱动支持和实时性能优化能力,更有利于跨模块调试与部署。
视觉与音频感知依赖于官方驱动和第三方库,摄像头模块通过 V4L2、OpenCV 等接口访问视频帧;麦克风阵列通过 ALSA 或 PulseAudio 接入系统。
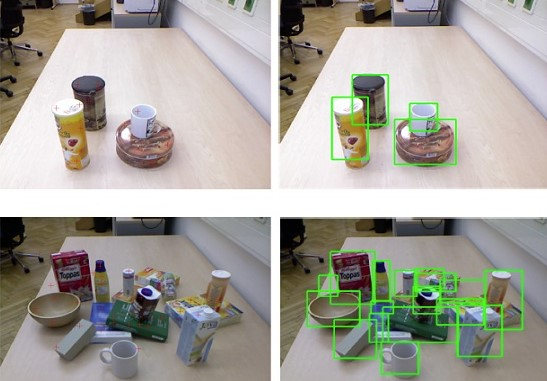
AI 算法是 DOM 系统的核心,用于实现环境感知、目标识别、行为决策等功能。主要包括:
通过预训练的轻量级目标检测模型(例如 MobileNetV2 + SSD)在边缘设备上进行实时推理,可识别前方障碍、行人等关键对象信息。
优化策略包括:
输入图像缩放与裁剪
量化模型以节省计算资源
异步推理与多线程处理
这些策略确保视觉感知在 Raspberry Pi 平台上拥有流畅性能表现。
感知模块给出环境信息之后,控制层依据策略模型进行决策,例如:
障碍规避
路径规划
状态机触发不同行为
与语音交互结合的指令响应
以上功能由核心算法和状态机逻辑协同完成,使机器人达到基础自主行为。
DOM 的运动控制层负责将 AI 决策转化为机器人实际动作,例如前进、转向与停止等。主要设计特点如下:
速度与方向控制
PWM 控制电机驱动
反馈循环调节行为
运动控制并不依赖开源机器人操作系统,而是通过定制控制逻辑完成闭环运动。可以在未来集成 ROS 或更高级规划器以增强性能。
为了便于开发者监控机器人状态以及远程操作,DOM 项目构建了一个自定义的 Web 仪表盘系统。
仪表盘显示机器人关键数据:
传感器数据流(如摄像头图像)
状态日志与 AI 决策结果
系统健康状态与警报
通过远程界面可以:
发送控制指令
调整运行参数
查看机器人当前位置与运行状态
这种设计大大提升了开发调试效率,并为机器人实际部署奠定了良好的远程运维能力。
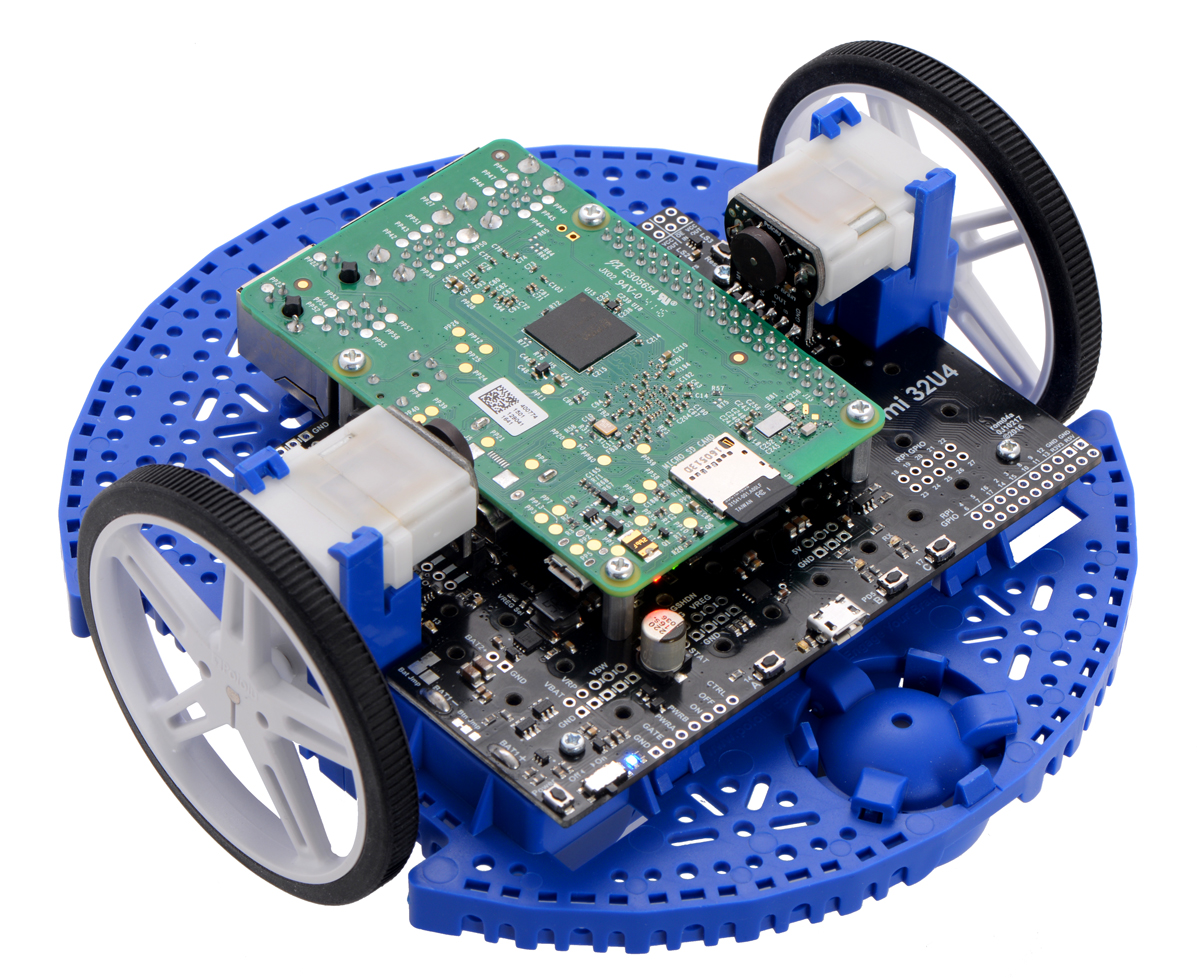
DOM 的机械结构使用 CAD 软件建模,并通过 3D 打印等方式制造,实现了模块化组件的设计:
底盘结构与电机罩
传感器支架
模块扩展接口
模块化设计便于未来升级与扩展其他传感器。
DOM 的整体系统在开发过程中进行了大量测试,主要关注以下指标:
视觉识别准确率与延迟
自主导航稳定性
语音交互响应速度
远程控制可靠性
性能测试显示,在 Raspberry Pi 平台上,该系统能够达到实时响应级别,实现稳定运行。针对环境复杂程度的不同,仍可通过模型优化与硬件升级获得更佳表现。
DOM 项目具备如下应用前景:
教育机器人平台
环境监测与巡检机器人
人机交互演示系统
移动服务机器人
未来可扩展方向包括:
集成更强边缘 AI 芯片,如 NVIDIA Jetson 系列
引入激光雷达或深度摄像头以提升地图构建能力
集成 SLAM 实现环境建图导航
使用 ROS 2 构建更通用架构
DOM 展示了一个从硬件、软件到 AI 决策的端到端开发方法,适合用于嵌入式 AI 自主机器人课程与实践项目指南。

本技术文稿系统化地整理了 DOM AI 自主机器人项目的设计思路、实现架构与工程亮点。DOM 作为一个高集成度、可扩展的自主机器人平台,在资源受限的单板计算环境下成功集成了 AI 感知、语音交互、自主决策与远程监控等功能。其工程价值在于为开发者提供一个实用的、可复现的项目模板,也为进一步研究与工业级开发提供基础。
<!-- 非定向300*250按钮 17/09 wenjing begin --> <!-- 非定向300*250按钮 end -->
</div>

