
当大多数人仍聚焦于让机器人承担端茶倒水等家务时,来自瑞士联邦理工学院(洛桑, EPFL )、美国杜克大学与葡萄牙高等理工大学的联合团队,已率先运用机器人部分替代动物开展生理学实验,旨在深入探究动物神经网络对各类智能行为的调控机制。
他们的最新研究成果 —— 题为《机器鱼连续与间歇游泳的能效与神经控制( Energy Efficiency and Neural Control of Continuous versus Intermittent Swimming in a Fish-like Robot )》的论文,已发表于顶刊《科学・机器人( Science Robotics )》 2026 年 1 月号(图 1 )。
1. 科学· 机器人( Science Robotics )网站截图
论文标题: Energy Efficiency and Neural Control of Continuous versus Intermittent Swimming in a Fish-like Robot.
值得注意的是,去年 10 月,该团队另一项通过机器鱼仿真研究斑马鱼视觉运动反应( optomotor response )的成果《人工具身神经网络揭示脊椎动物视觉运动行为的神经架构( Artificial embodied circuits uncover neural architectures of vertebrate visuomotor behaviors )》,也发表于该期刊。
斑马鱼,越来越受关注的实验室模式动物
与小白鼠类似,斑马鱼是近年来备受科学领域关注的模式生物(图 2B)。其幼鱼(larval zebrafish)凭借身体透明、繁殖能力强等优势,成为观测神经元活动与行为实时关联的理想活体模型。
论文第一作者Xiangxiao Liu(刘祥骁)在研究中指出: 受技术限制,当前及未来相当长一段时间内,科研人员仍无法在活体斑马鱼幼鱼活动状态下,对其神经回路进行精准的创建、改造与观测;同时,动物实验中难以精准调控动物行为以契合实验需求。
仿生机器人实验恰好填补了这一空白:研究者可通过编程构建斑马鱼神经网络模型,对模型进行改造与对比分析,从而在可控环境中精准验证神经环路与运动表现的因果关系。
此外,在机器鱼(图 2A、图 2C)或机器鱼仿真(数字孪生)系统中开展实验,不仅完全不受伦理约束,且成本远低于传统动物实验。这种 “活体实验难以实现,机器人实验高效可行且优势显著” 的 特点 ,正推动神经科学从相关性观察向机制性解析跨越。
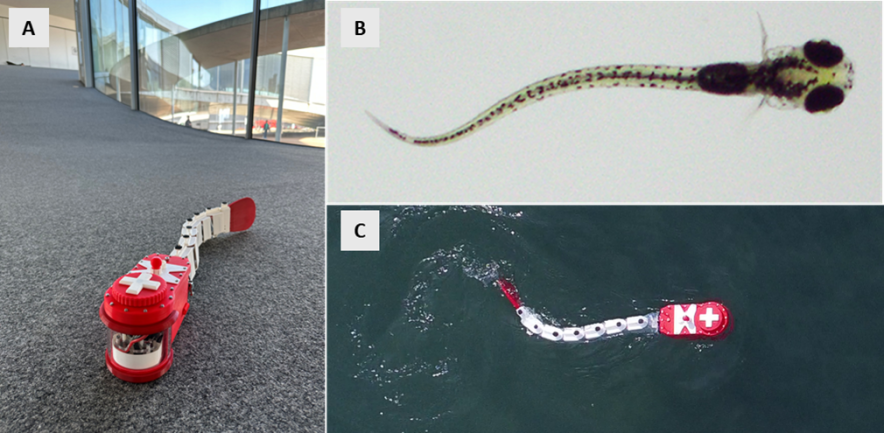
2. A 和 C : 仿斑马鱼机器鱼 ZBot ( larval zebrafish inspired robot )照片; B: 斑马鱼幼鱼( larval zebrafish )照片( Guillaume Valen tin, EPFL 提供)。
“ 中枢模式发生器( CPGs ) + 动作门( bout gate ) ” :
驱动仿斑马鱼间歇性游泳
运动能力是动物多数行为(如捕食、避险等)的基础,因此探究动物行为的前提是解析其运动机制。 EPFL 机器人团队与杜克大学生物团队携手合作,基于斑马鱼神经网络的相关研究成果,构建了一套以中枢模式发生器(central pattern generators, CPGs)+ 动作门(bout gate)为核心的斑马鱼幼鱼间歇性游泳模型。
同时,EPFL 团队研发了模仿斑马鱼幼鱼形态的机器鱼 ZBot(larval zebrafish inspired robot)。该模型驱动的 ZBot 不仅能精准复现斑马鱼幼鱼的 “慢速直行 2(slow 2 ,视频 1 ) ” 与 “常规转向(routine turn)” 游泳行为(图 3),更令人惊喜的是,通过调节运动神经元(motor neuron)输出增益等参数,还可模拟出 J 型转向(J-turn)、接近游泳(approach swim)等多种游泳步态。

3. 机器鱼 ZBot 复现斑马鱼幼鱼的游泳表现。
视频 1. 机器鱼连续型游泳和间歇性游泳。
流体粘度影响运动位移,
对转向功能几乎无干扰
水中生物体型差异极大,从体长可达 30 米的蓝鲸到仅 4 毫米的斑马鱼幼鱼,其游泳所处的流体力学环境截然不同。体型较大的鱼类游泳时雷诺数较高,惯性力起主导作用;而斑马鱼幼鱼等小型水生生物处于低雷诺数区间,黏性力占主导。
为厘清不同雷诺数下的运动机制差异,研究者利用 “雷诺数与特征长度成正比、与流体粘度(viscosity)成反比” 的物理原理,对 ZBot 在不同粘度流体环境中进行参数化测试,测试介质包括普通水(粘度 = 1)、中粘度流体(粘度 = 213.9 cP)及高粘度流体(粘度 = 457.0 cP)。
实验结果显示:随着流体粘度升高,ZBot 的推进效率显著下降,在高粘度流体中的位移仅为普通水中的约三十分之一 (视频 2) ,但此时其运动轨迹与斑马鱼幼鱼在天然低雷诺数环境下的真实游动模式愈发贴近。
令人意外的是,高粘度流体(低雷诺数)对转向功能几乎无影响 —— 例如,ZBot 在普通水中完成一次转向动作(turning bout)的转向角度约为 60 度,在高粘度流体中仍可达约 45 度。
视频 2. 流体粘度 升高快速降低 运动位移 。
间歇性运动被普遍认为能提升动物运动的能量效率,传统观点认为其核心原因是鱼类滑行时身体保持直线,可减小水的阻力。而该研究团队提出了全新猜想:间歇性游泳能使驱动器(或动物肌肉)始终处于更高效的工作区间,进而提升整体能效。
为验证这一猜想,研究人员首先对比了生物肌肉与实验所用伺服电机的 “负载 – 效率” 特性,发现二者均呈现倒 U 型效率曲线 —— 中等负载时效率达到峰值,过载或轻载时效率则急剧下降;随后,通过测量电机负载状态并预测效率,证实 ZBot 在间歇性游泳模式下,以相同速度运动时,电机效率及综合能效均高于连续游泳模式。不过,受限于间歇性游泳的占空比(limited duty factor),其最大速度无法达到连续游泳模式的水平。这一现象在普通水及两种高粘度流体中均普遍存在。
该研究通过对机器鱼的系统性实验,巧妙借助 “机器人实验” 相较于 “动物实验” 的独特优势,揭示了单纯依靠动物实验难以探明的深层机制。这不仅深化了人类对生物运动行为及运动机理的认知,更为机器鱼控制策略提供了新方法:中低速巡航场景下,优先采用间歇式驱动以最大化能效;高速机动任务中,则切换至连续驱动模式以保障响应速度与位移能力。
本篇论文的第一作者为 Xiangxiao Liu (刘祥骁), 本科毕业于东南大学自动化学院,硕士和 博士毕业于日本大阪大学,就读期间获日本学术振兴会( JSPS DC1 )资助,后续于瑞士洛桑联邦理工学院( EPFL )开展博士后研究工作。
转载请联系本公众号获得授权
投稿或寻求报道:liyazhou@jiqizhixin.com
]article_adlist–>
<!-- 非定向300*250按钮 17/09 wenjing begin --> <!-- 非定向300*250按钮 end -->
</div>

